Overview
This was the first day ‘learning’ about AWS and robotics. Below you will find the set of videos that I worked through and my notes from those videos. These notes are not intended to necessarily be consumed by others, but I thought that they might be useful for someone that is looking for good tutorial videos. I will continue to document my journey and in a month, provide an overall summary and recommendations for a learning path.
I still have not found a good collection of tutorials that walks you from ‘getting started’ in AWS to ‘fleet management’. Might be out there but I just haven’t found it yet. My hope is that by going through these I might be able to create a set of these types of tutorial. This is the start.
Videos
- Using AWS RoboMaker Simulation for Real World Applications
- REVIEW: Not a great video. Very high-level with no real meat in the video. Would only recommend if you don’t know anything about RoboMaker, AWS or programming. Most of the videos start with a high-level review of the AWS technology so you will get this overview over time.
- Build Your First Cloud-Connected Robot
- REVIEW: Fun video. On the right track. Cool things that have been made, but there was not a lot of ‘digging in’. They promised digging in, but never really did. Looked for the follow-up videos but I could not find them (see Todo Items)
- Getting Started with Robots & AWS RoboMaker
- REVIEW: Great starter video for where I am at. I know how to program. Know a bit about AWS full-stack development. Went through an example with ‘Paired Programming’ approach. Things learned: How to leverage Cloud9, writing python code to define a ROS node, how to bundle a robot package and a simulation package (well sort of, see Todo Items), import bundles into S3 for use with RoboMaker and how to configure those bundles.
Items learned on this Day
- AWS Cloud9 has integrated RoboMaker dev tools to make developing, testing and deploying easier.
- How to build and integrate a ROS defined robot into RoboMaker.
- Build robot and simulation ros files.
- ROS programming is python
- See Video notes for Getting Started with Robots & AWS RoboMaker below.
- Learned a little about servos
- Brief reference in the Build Your First Cloud-Connected Robot video. See notes in Build Your First Cloud-Connected Robot video.
ToDo Items
- Need to learn more about how to do two-way interactions with the Dynamixel servos.
- Learn how to bundle ROS robot and simulation packages.
- Find if there are more videos for the Build Cloud-Connected Robots
Videos
Using AWS RoboMaker Simulation for Real World Applications
- Video Link
- Overview video with not a lot of depth.
- Just walks through the services with statements of ‘You can do this…’ without showing you how to do anything.
- Speed video up to at least 1.5. Speaker, speaks very slowly.
- Learned: Cloud9 has ROS tooling
Build Your First Cloud-Connected Robot
- Video Link
- A build video.
- Show-and-tell with multiple robots.
- No ‘getting your hands dirty’
- Cool application using Leap Motion Tracker and robots.
- Learned about the benefits of Dynamixel servos.
- Small on-board computers that not only receive, but also sends information about the status of the serve (NOTE: Need to learn more about how to do two-way interactions with the Dynamixel servos.)
- Promised to show in future episodes but unable to find those episodes.
Getting Started with Robots & AWS RoboMaker
- Video Link
- Starting to get hands dirty.
- Cloned a ‘Hello world’ repository.
- Under
srcfolder there is apackage.xml- All of the information on the packages that need to be installed to get your robot to run.
CMakeLists.txt: Makefile. Describes how the applications are built. What files are needed, etc.- ROS programming is based on noeds.
- Point in video where they begin RosPy Programming of the robot node.
- Nodes are small micro-functions that can be assigned to parts of the robot (e.g.,
rotate.py)Video Point. Build Your Robot: launch file (
rotate.launch)Video Point. Build Your Robot: build the robot packages.
1 2 3 4 5 6
cd robot_ws colcon build #Builds all of the code source install/local_setup.sh # Run in Cloud9 with messages # roslaunch <nameOfPackage> <NameofFileToLaunch>: # to launch the program in the Cloud9 environment roslaunch hello_world_robot rotate.lauch
Video Point. Build Your Robot: Start integrating RoboMaker
- You need to bundle the packages but they don’t describe how to do that. Pre-baked because it takes a few minutes to get done.
- NOTE: Learn how to bundle the packages.
1 2 3 4 5
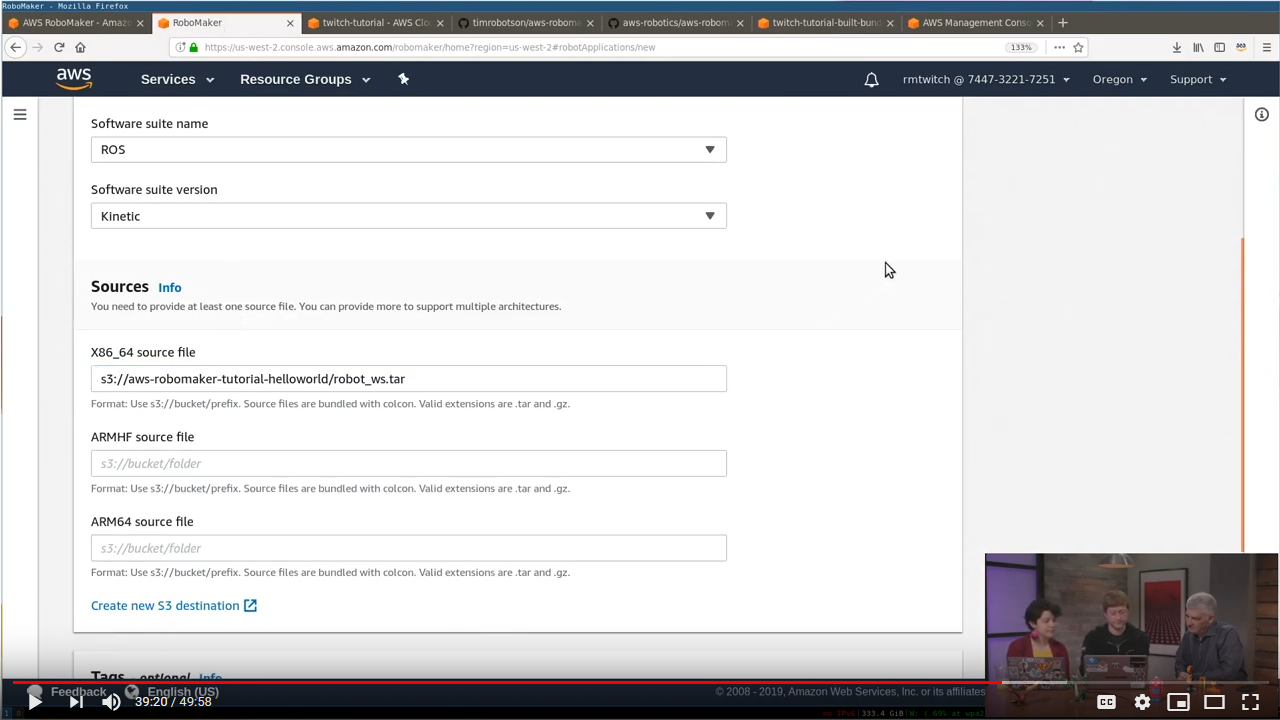
cd robot_ws # File called output.tar # Copy the bundle file to an S3 bucket # aws s3 cp bundle/ouput.tar s3://<bucketName>/<fileName.tar> aws s3 cp bundle/ouput.tar s3://aws-tutorial/robot_ws.tar
Setup RoboMaker Robot Definition.

- NOTE: Learn how to bundle the packages.
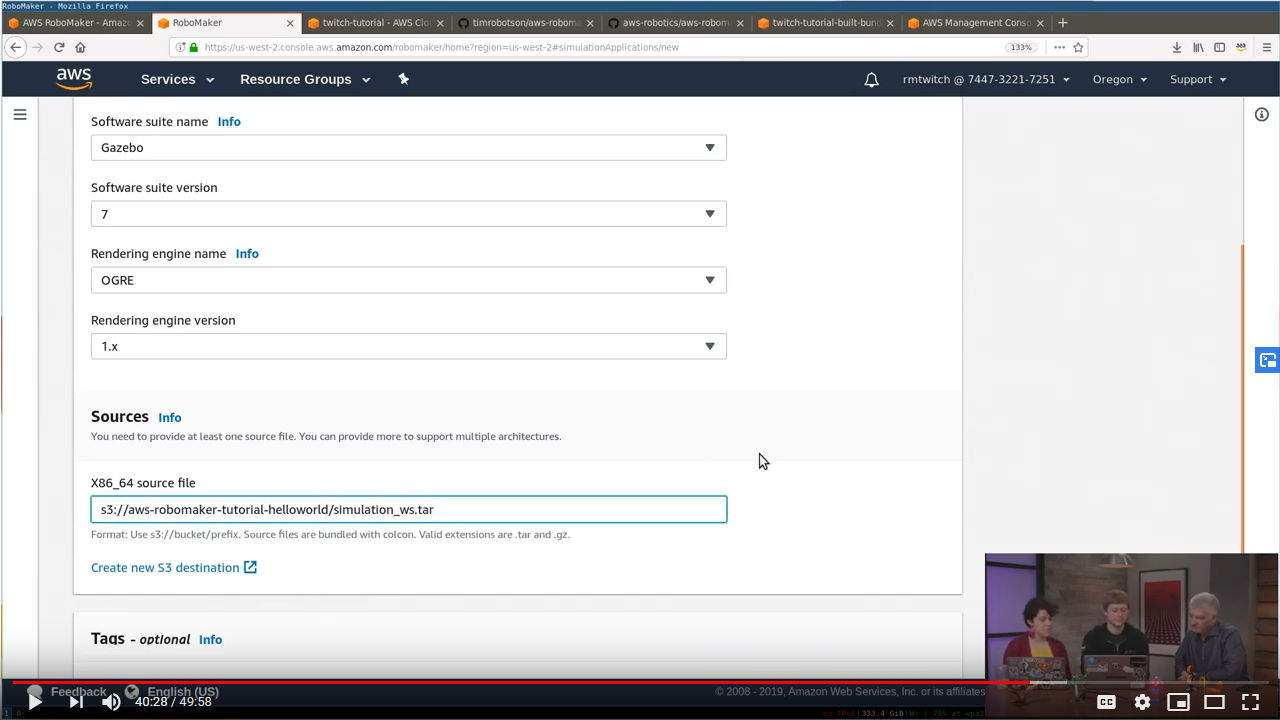
Setup RoboMaker Simulation Environment.
- NOTE: They do not describe how to make the
simulation_ws.tarfile. Not sure if it is built with thecolcon buildcommand or another command.Video Point. Build Your Robot: Simulation Job.
- Pre-baked so don’t go into the details of how to connect the Robot and environment into the simulation job.